1.回転原理
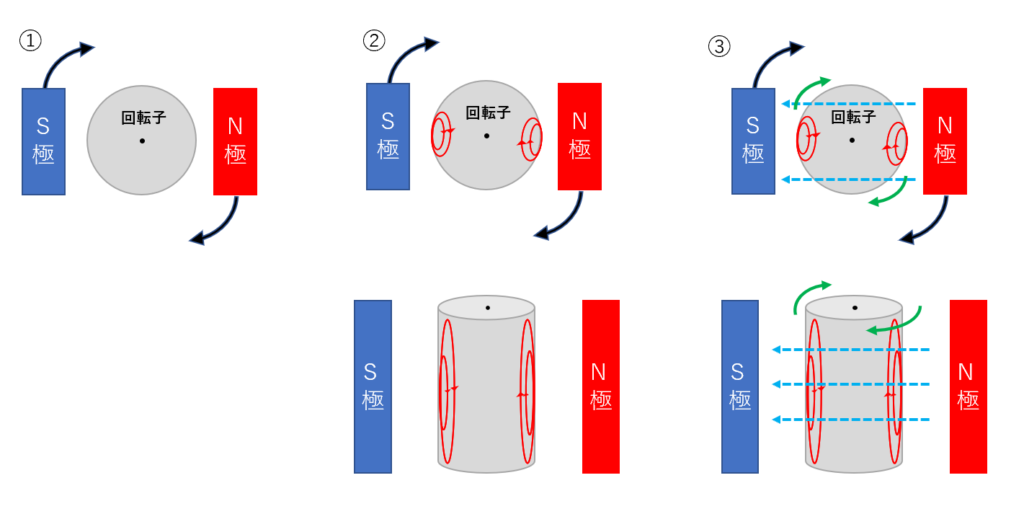
誘導電動機の回転は大きく次の3ステップで進む。
- 回転子の周りを磁石が回転する
- 回転子に電磁誘導が起こり電流が流れる(渦電流が発生)
- 電流が磁石の磁界が作用し、電磁力(回転力)が生まれる
回転原理の基礎についてはこちらの記事で!
関連記事
実際の誘導電動機は、外側の磁石の代わりに 固定子に巻かれたコイルに発生する磁界の変化を利用している。
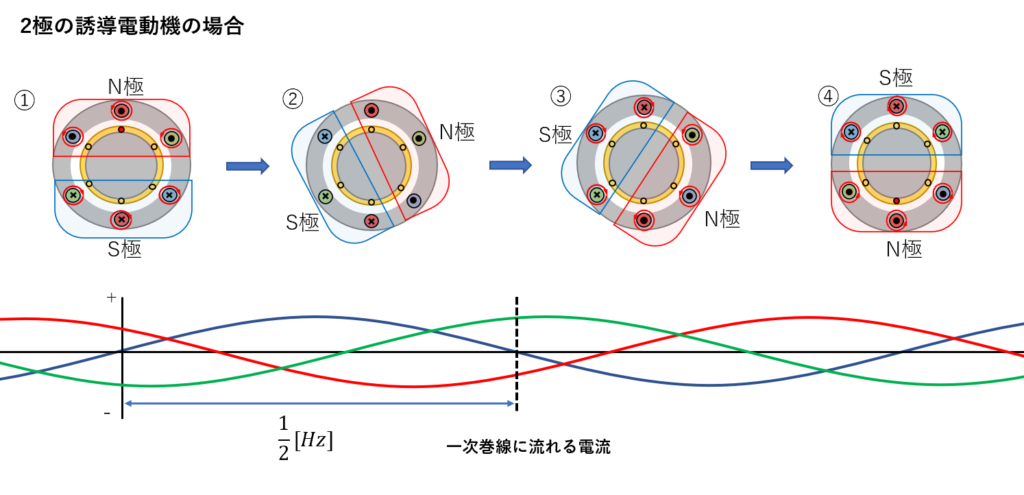
2.同期速度
固定子の磁界は、時間とともに回転する。固定子磁界の回転する速度を同期速度という。
周波数を\(f[Hz]\),電動機の極数を\(p\)とすると同期速度\({}N_0 [{}min^{-1}]\)は
\({}N_0=\frac{120f}{p} [{}min^{-1}]\)
磁界N極,S極で必ずセットなので 極数は必ず偶数になる。
また、極数が大きいほど同期速度が遅くなるので、電動機の回転速度も遅くなる。
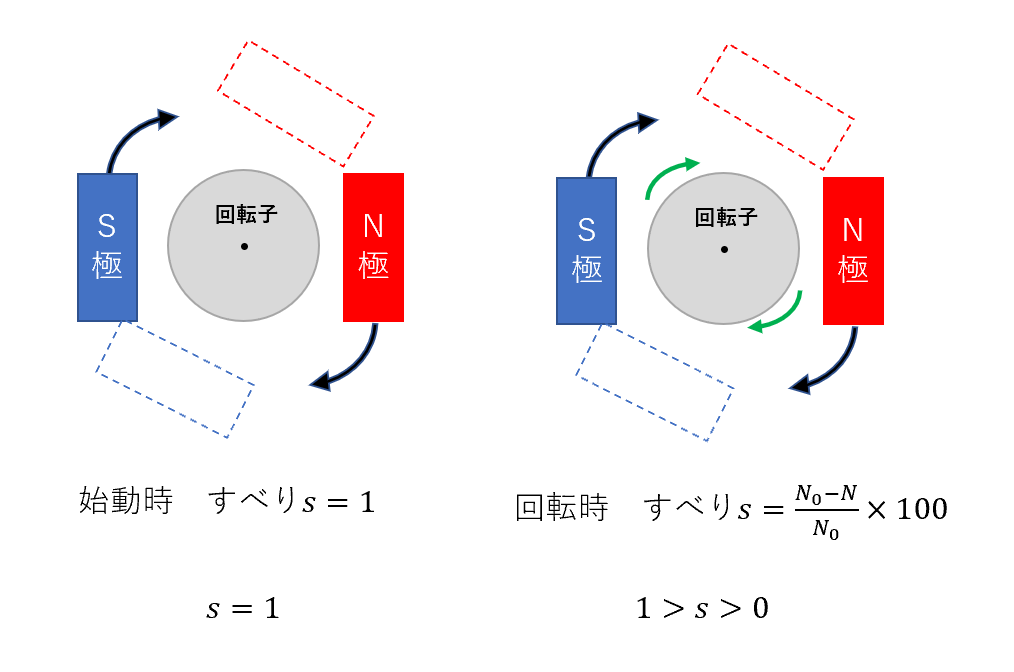
3.すべり
誘導電動機は、回転原理の特性上 固定子磁界の回転速度(同期速度)と回転子の回転速度にはズレが生まれる。このズレをすべりという。
同期速度を\({}N_0[{}min^{-1}]\),回転子の回転速度を\(N[{}min^{-1}]\),すべりを\(s\)[%]とすると
\(s=\frac{{}N_0-N}{{}N_0}×100\)
すべりは 二次電流や電動機出力の計算に重要な要素となる。
また、すべりのない誘導電動機は回転できない。
※すべりが0より小さくなる時は誘導機は発電機として働く。
リンク






コメント